Robotic path planning problems
We are interested in problems related to the following questions:
1) How to optimize the visibility of an observer in an environment that has complicated obstruction of line-of-sights?
2) How to move a robot to efficiently learn an unknown piece of domain?
3) How to use machine learning to address such types of problems?
Simple greedy approach:
Step 1: At an observing location, sample the nearby environment.
Step 2: Analyze all the perviously obtained data, and determine the next observation location.
Repeat Steps 1 and 2 until no further gain in information is possible.
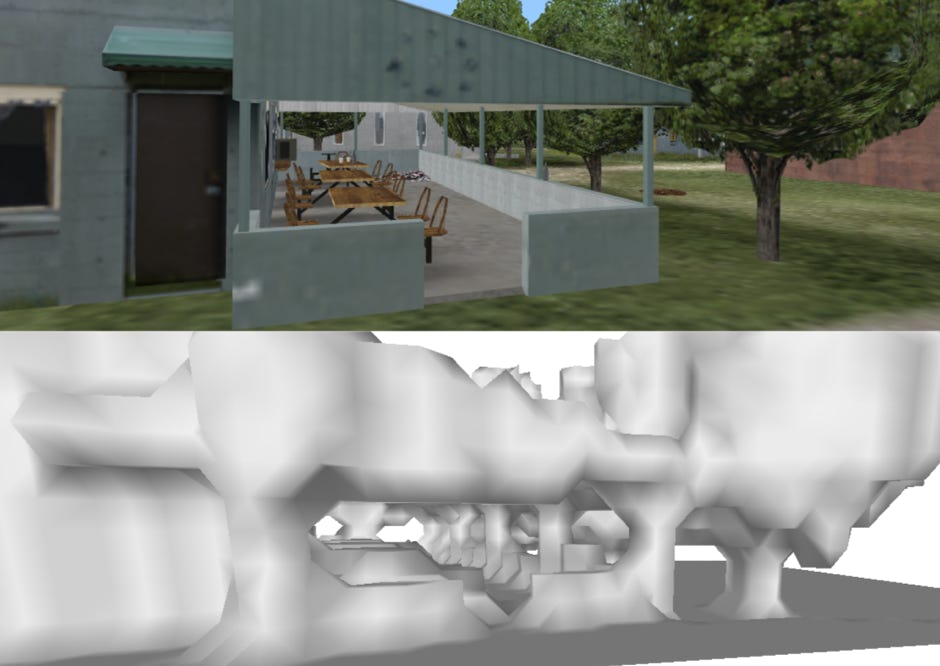
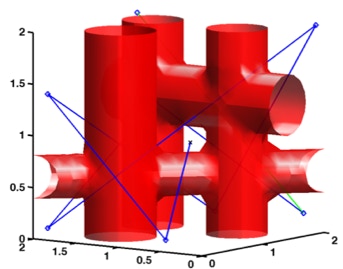
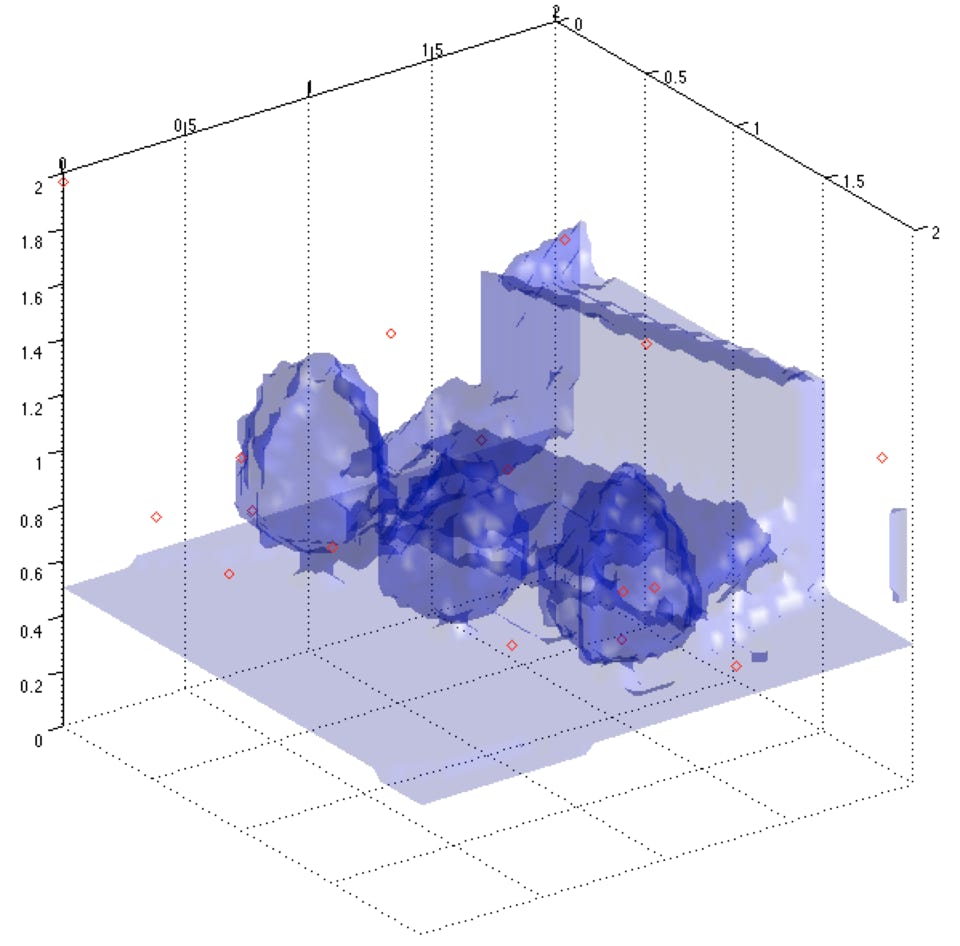
Gallery: Proof of concept of a full 3D autonomous algorithm that learns a complex structure by adaptively adding a sequence of observing locations (shown as the vertices of the polygonal path).
Gallery: un-supervised learning and exploration of complex domains using point clouds
Ref: Landa and Tsai, Commun. Math. Sci. Vol. 6, No. 4, 2008

Gallery: un-supervised learning and exploration of complex domains using point clouds